Resonanzfrequenz
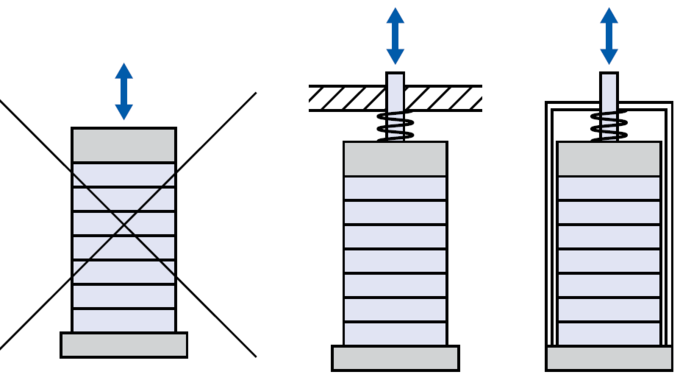
Die in den technischen Daten angegebenen Resonanzfrequenzen von longitudinalen Stapelaktoren beziehen sich auf den beidseitig freien Betrieb. In einer Anordnung mit einseitiger Einspannung muss der Wert halbiert werden.
Der reduzierende Einfluss einer zusätzlichen Last auf die Resonanzfrequenz kann mit folgender Gleichung abgeschätzt werden (Berechnung meff s. Abb. 1):
![Resonanzfrequenz mit Last [Hz]](/fileadmin/_processed_/3/d/csm_PIC_Gleichung_17_35908c00f6.png "Resonanzfrequenz mit Last [Hz]")
![Phasenwinkel [Grad]](/fileadmin/_processed_/0/9/csm_PIC_Gleichung_18_743ce23621.png "Phasenwinkel [Grad]")
f0' |
|
| f0 | Resonanzfrequenz ohne Last [Hz] |
| meff | Effektive Masse Piezostapelaktor [kg] |
| meff' | Effektive Masse Piezostapelaktor mit Last [kg] |
| φ | Phasenwinkel [Grad] |
| f | Ansteuerfrequenz [Hz] |
| m | Masse des Piezoaktors |
| M | Zusätzliche Last |
| Tmin | Zeit, in der der Piezoaktor seine nominale Auslenkung erreichen kann |
Schnelles Ansprechverhalten ist eine charakteristische Eigenschaft von Piezoaktoren. Eine schnelle Änderung der Betriebsspannung bewirkt eine schnelle Positionsänderung. Dieses Verhalten ist besonders bei dynamischen Anwendungen wie z. B. in der Scanning-Mikroskopie, der Bildstabilisierung, in Ventilsteuerungen, bei der Erzeugung von Schockwellen oder in der aktiven Schwingungsdämpfung erwünscht. Ein Piezoaktor kann bei schlagartigem Anstieg der Steuerspannung seine nominale Auslenkung in ungefähr einem Drittel der Periodendauer seiner Resonanzfrequenz f0 erreichen (Abb. 2):



Bei geeigneter Ansteuerelektronik können Piezoaktoren hohe Beschleunigungen von einigen Zehntausend m/s² erzeugen. Durch die Trägheit evtl. angekoppelter Massen sowie der Aktoren selbst entstehen dynamische Zugkräfte, die durch >> mechanische Vorspannungen kompensiert werden müssen. Im Sinusbetrieb können die maximalen Kräfte wie folgt abgeschätzt werden: